.png)
 8 hours ago
8
8 hours ago
8

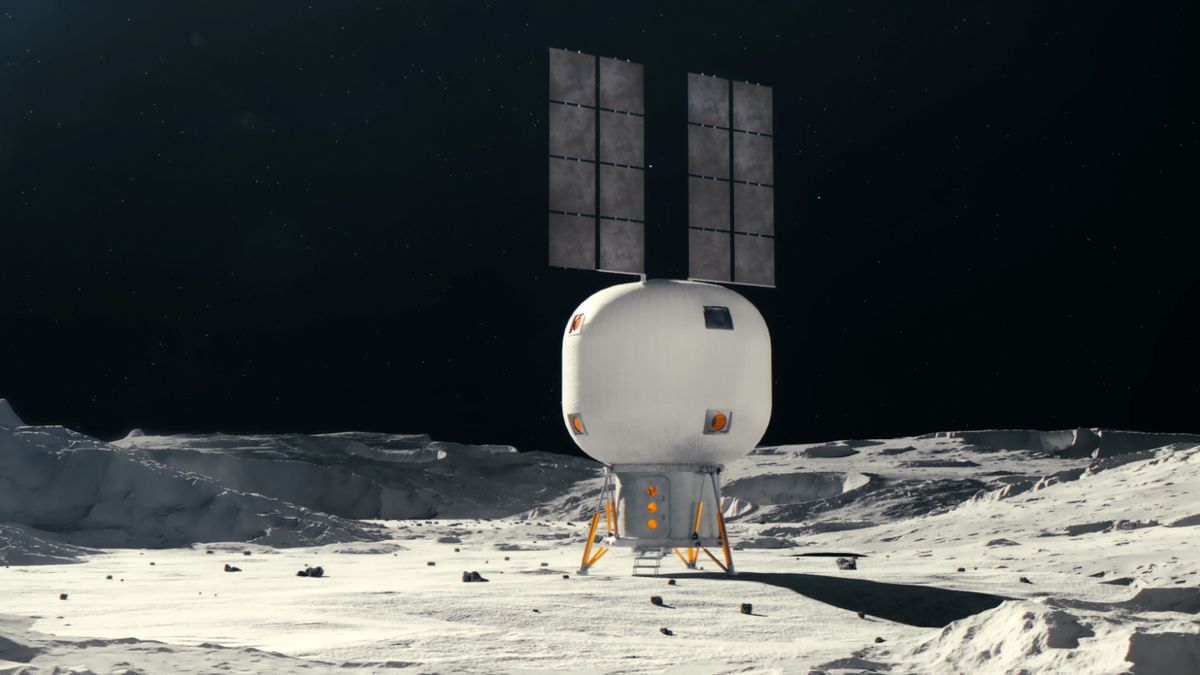
Teleoperated rovers could soon be working on the moon, with human controllers on Earth manipulating the rovers' tools virtually, allowing for greater dexterity when taking samples, digging or assembling.
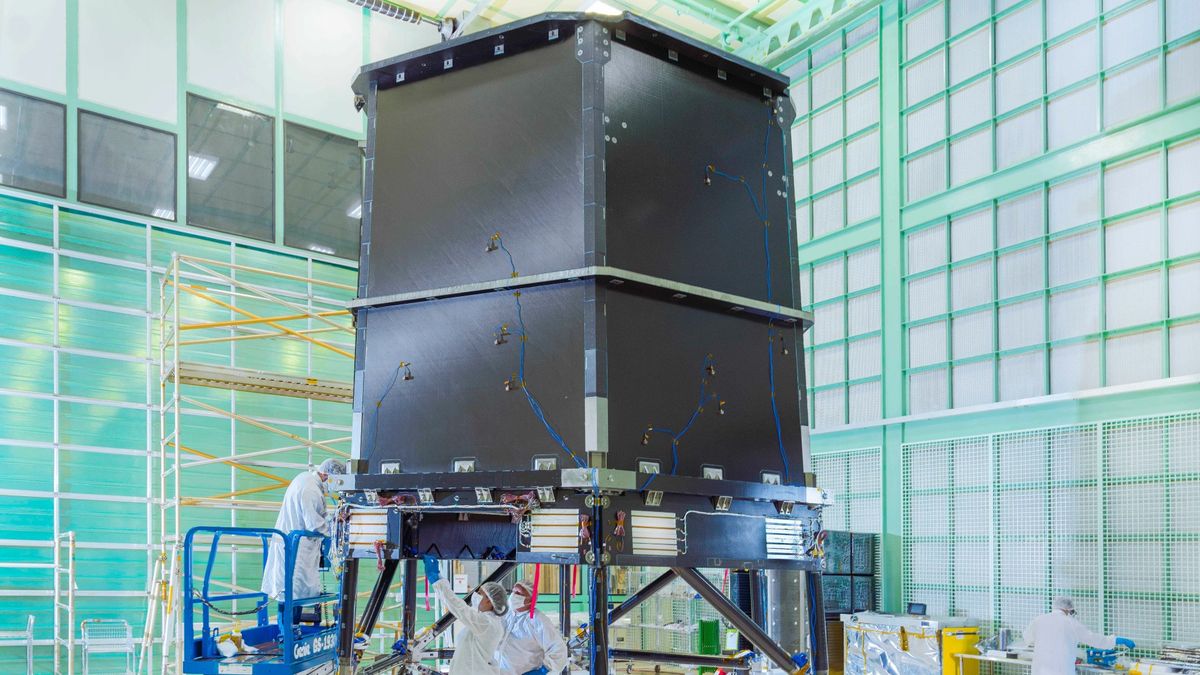
Researchers from the robotics laboratory at the University of Bristol in England have tested their new teleoperations system at the European Space Agency's (ESA) European Centre for Space Applications and Telecommunications at Harwell in Oxfordshire. By controlling a virtual simulation of a rover, they were able to manipulate a robotic arm to dig a sample of pretend lunar regolith (called simulant). The process negates the need for camera feeds, which can lag because of the 1.3-second time delay between Earth and the moon. The signals between the teleoperators and robotic missions on the moon could in future be relayed by satellites belonging to ESA's planned Moonlight project.
"This simulation could … help us operate lunar robots remotely from Earth, avoiding the problem of signal delays," said Bristol's Joe Louca in a statement.

The virtual simulation also incorporates "haptic" interactions. In other words, it gives the user a sense of touch, mimicking the tactile properties of lunar regolith in the moon's low gravity. This gives teleoperators a greater sense of how much force they have to use to dig into regolith, or to lift up a sample in a scoop. So far, the haptic interactions have only been included in the virtual versions of basic tasks, such as pressing regolith into the ground or dragging a scoop through it, but not yet for more complex tasks.
Related: Moon robots could build stone walls to protect lunar bases from rocket exhaust
"We can adjust how strong gravity is in this model, and provide haptic feedback, so we could give astronauts a sense of how moon dust would feel and behave in lunar conditions — which has a sixth of the gravitational pull of the Earth," said Louca.
The system could also be used to train astronauts who may one day go to the moon by giving them a realistic simulation of what to expect.
"One option could be to have astronauts use this simulation to prepare for upcoming lunar exploration missions," said Louca.
However, before that can happen, Louca says there are trust issues to overcome. Previous studies have shown that there is a psychological barrier to trusting whether the virtual system that a user is operating is performing as it should in reality.
Louca's team has quantified the efficiency and trustworthiness of their virtual system, finding that, when scooping up regolith simulant, the system was efficient 100% of the time and trustworthy 92.5% of the time. Pouring simulant out of the scoop was a little less reliable, but they found that by restricting the orientation of the scoop while carrying the simulant, it could be performed more precisely.

Although designed with the moon in mind, in principle the same teleoperation techniques could also be used for missions to Mars. This could be particularly helpful for the challenging task of retrieving sample tubes from a rover and loading them onto another vehicle that would blast off from Mars and bring the samples back to Earth.
As the budget and timeline on NASA's Mars current sample-return project have spiraled out of control, the space agency has solicited industry to help develop a solution. Rocket Lab won a contract recently to conduct a detailed study into a possible solution for retrieving the Perseverance rover's samples, although it may be too soon for teleoperation to play a role. However, other sample-return and exploration missions to the moon, Mars and other rocky bodies such as asteroids may all benefit from teleoperation in the future.
"In the next decade we're going to see several crewed and uncrewed missions to the moon, such as NASA's Artemis program and China's Chang'e program," said Louca. "This simulation could be a valuable tool to support preparation or operation for these missions."




























 Bengali (BD) ·
Bengali (BD) ·  English (US) ·
English (US) ·